5.3.3. EwoK permissions¶
Contents
5.3.3.1. General principle¶
Permissions are statically set at configuration time, before building the firmware, and cannot be updated during the device life-cycle. Each application permission is stored in a .rodata part of the kernel, reducing the risk of any tampering with.
5.3.3.2. Configuring the permissions¶
Permissions are configured by using two complementary means:
- The whole permissions, except IPCs, are set using
menuconfig- IPCs are configured by editing
apps/ipc.configandapps/dmashm.configfiles
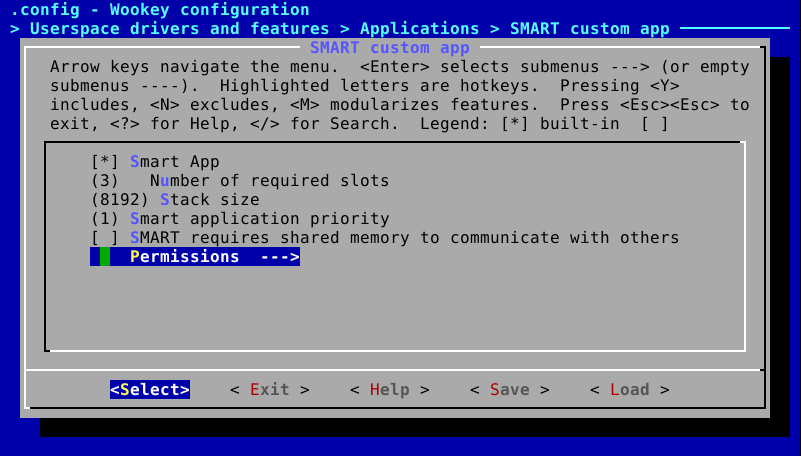
5.3.3.2.1. Menuconfig¶
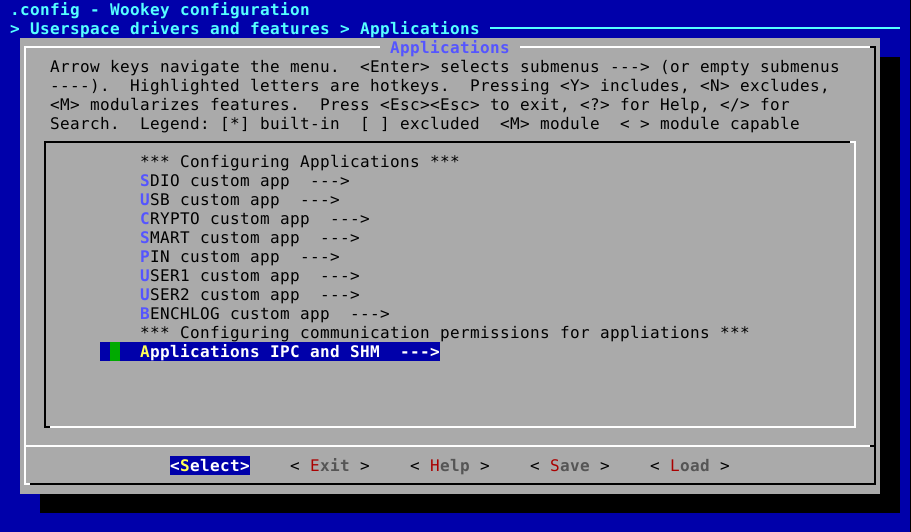
Each application has its own permissions set by menuconfig:
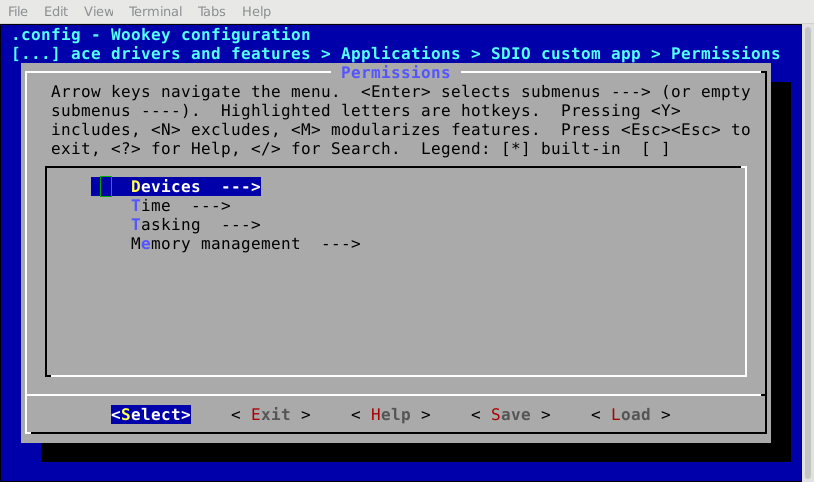
- Permissions are separated into 4 families:
- Devices
- Time
- Tasking
- Memory management
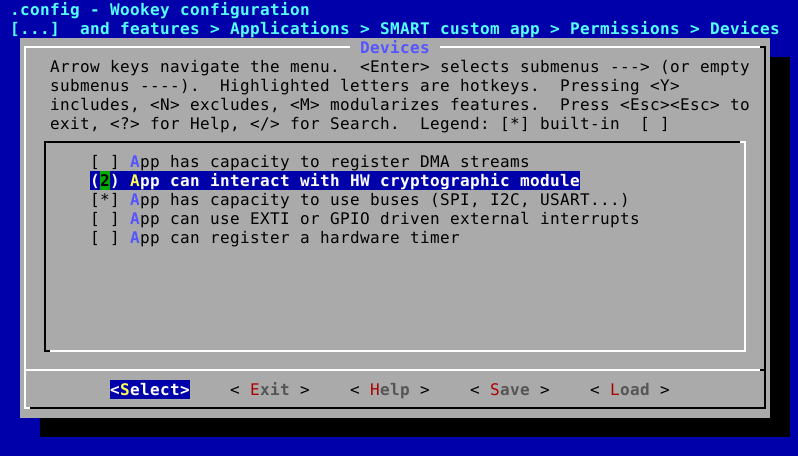
5.3.3.2.1.1. Devices¶
- Devices permissions controls the capability to:
- Use DMA streams
- Use the hardware cryptographic module
- Use buses (SPI, I2C, etc.)
- Use EXTIs
- Use a hardware timer
Warning
Devices permissions impact the sys_init(INIT_DEVACCESS) syscall
5.3.3.2.1.2. Time¶
Time controls the capability to use the kernel internal clock:
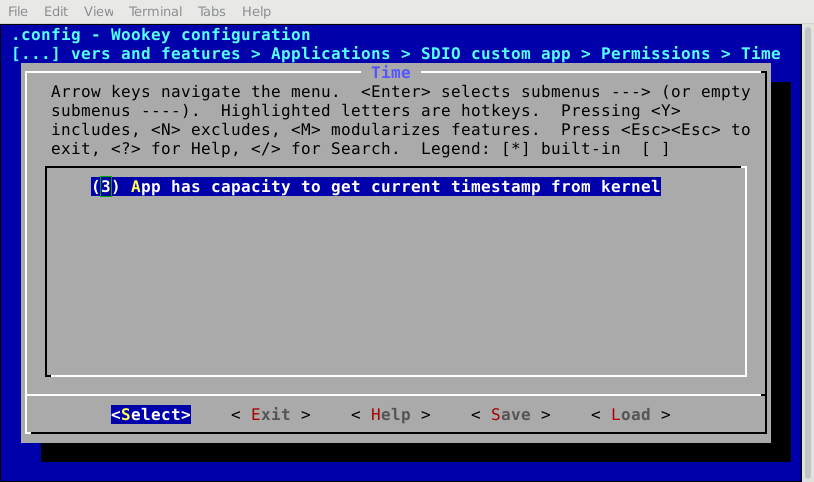
This option allows to specify the granted granularity of the timestamp returned by the kernel:
- No time measurement is possible
- Tick granularity
- Microsecond granularity
- CPU cycle granularity
Warning
Time permissions impact the sys_get_systick() syscall
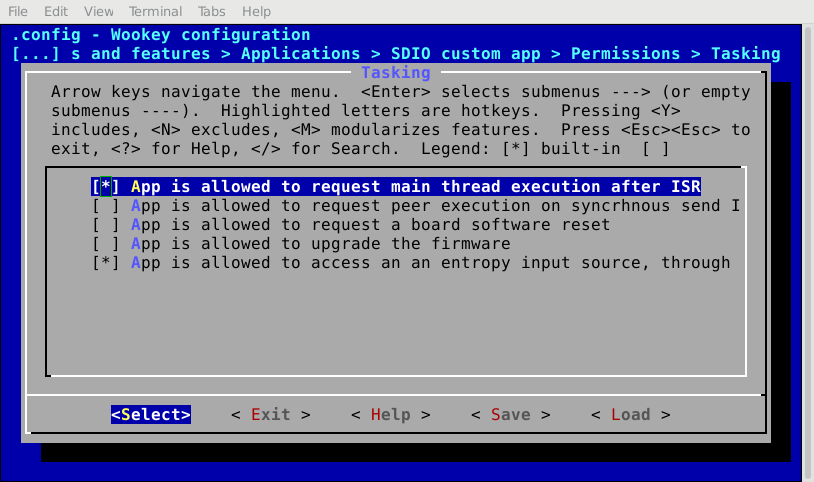
5.3.3.2.1.3. Tasking¶
- Tasking controls the capability to:
- When an ISR exit, its main thread is scheduled, bypassing the default scheduling policy. This is needed by devices requiring a high responsiveness (e.g. smart cards over IS7816-3 buses)
- When the task sends an IPC, if the target task is idle or runnable, it is immediately scheduled, bypassing the scheduling policy
- Reset the board
- Upgrade the firmware
- Access to randomness generated by the kernel (and relying on the hardware RNG)
Warning
Devices permissions impact the sys_init(INIT_DEVACCESS) and sys_reset() syscalls
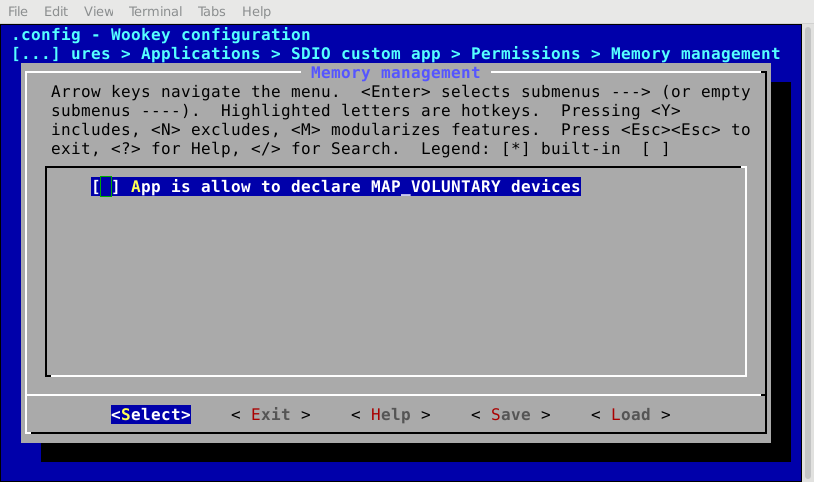
5.3.3.2.1.4. Memory management¶
Memory management controls the capability to voluntary map or unmap a device in the task’s address space.
This does not permit to declare a new device, but only to temporary (un)map it from the task’s address space, if the driver supports this feature.
Warning
Devices permissions impact the sys_init(INIT_DEVACCESS) syscall
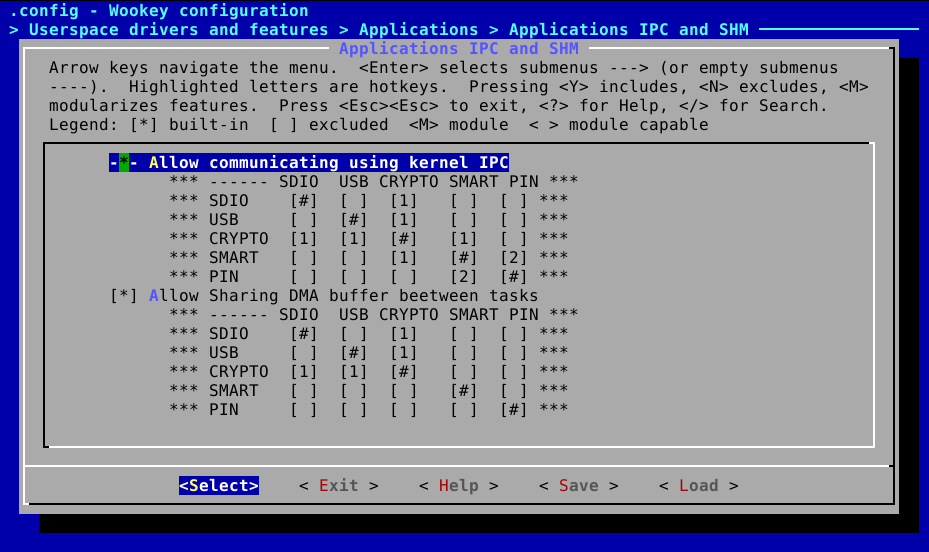
5.3.3.2.2. IPCs¶
Communication permissions are based on two arrays, found in plain-text files:
- The array in
apps/ipc.configis used to set the permissions for using the IPC mechanism- The array in
apps/dmashm.configis used to set the permissions for using the DMA shared memory mechanism
IPC array is in apps/ipc.config. The sender is on the left column. Setting
1 in a box means that the task on the left is able to send a message
using IPCs to the one above:
comment "------ SDIO USB CRYPTO SMART PIN"
comment "SDIO [#] [1] [ ] [ ] [ ]"
comment "USB [ ] [#] [ ] [ ] [ ]"
comment "CRYPTO [ ] [ ] [#] [ ] [ ]"
comment "SMART [ ] [ ] [ ] [#] [ ]"
comment "PIN [ ] [ ] [ ] [ ] [#]"
Warning
A task is not allowed to send IPC to itself
DMA shared memory array is in apps/dmashm.config. The “caller” is
on the left column. A mark in a box means that the task on the left (the
“caller”) is able to share a buffer with another task (the “granted”). The task
selected on the right columns are granted to use a buffer in “caller” address
space for DMA transfers:
comment "------ SDIO USB CRYPTO SMART PIN"
comment "SDIO [#] [ ] [ ] [ ] [ ]"
comment "USB [ ] [#] [ ] [ ] [ ]"
comment "CRYPTO [ ] [ ] [#] [ ] [ ]"
comment "SMART [ ] [ ] [ ] [#] [ ]"
comment "PIN [ ] [ ] [ ] [ ] [#]"
Note that menuconfig displays those arrays, but without the possibility to modify them: you will have to edit the associated files manually.
Warning
A task is not allowed to delcare DMA SHM to itself